CEATEC 2015Īóź╗ź¾źĄ+▒■├ōżŪ╝┬╬ü┐āż╣ŗēäźßĪ╝ź½Ī╝
CEATEC 2015żŪżŽĪó┼┼╗ęŗēäŠÅČ╚ż╬ĖĄĄżż╬╬╔żĄż¼·t┐āرż╦żŌżĶż»╔Įżņż┐ĪŻIoT╗■┬Õż╦Ė■ż▒ź╗ź¾źĄż“Š}²Xż▒żļ┤ļČ╚ż¼¾Hż»ż╩ż├żŲżŁż┐ż¼Īó├▒ż╩żļź╗ź¾źĄż└ż▒ż╬·t┐āżŪżŽż╩żżĪŻź╗ź¾źĄż“╗╚ż├ż┐źŌźĖźÕĪ╝źļ(źĄźųźĘź╣źŲźÓ)żŌ×æ║ŅżĘĪóź╗ź¾źĄŗēäżŪ▓─ē”ż╩▒■├ōż“┐āżĘż┐ĪŻ
CEATEC 2015ż╦┼ņėøżõźĮź╦Ī╝ż╩ż╔Š’Žóż¼╗▓▓├ż╗ż║Īó╚ŠŲ│öüźßĪ╝ź½Ī╝żŌż█ż╚ż¾ż╔ż¼ųeż“Š├żĘż┐ĪŻ║ŻŃQżŽźĒĪ╝źÓż╦▓├ż©ĪóźĮźĘź¬ź═ź»ź╣ź╚ż¼▓├ż’ż├ż┐ż└ż▒ż╦é╬ż▐żļĪŻ¾Hż»ż╬╚ŠŲ│öüźßĪ╝ź½Ī╝żŽ║ŻżõĪó┴╚ż▀╣■ż▀źĘź╣źŲźÓ┤žĘĖż╬·t┐ā▓±ż╦öĪż├ż┐ĪŻż│ż┴żķ┤žĘĖż╬·t┐ā▓±żŽĪóźūźĒżĘż½═Ķż╩żżż┐żß═ĶŠņŪv┐¶żŽŠ»ż╩żżżŌż╬ż╬Īó·t┐āż╣żļŖõż╬Ė·▓╠żŽ╣ŌżżĪŻ┼┼╗ęŗēäźßĪ╝ź½Ī╝ż╬├µż½żķżżż»ż─ż½ų`ż╦ż─żżż┐żŌż╬ż“Šę▓ż╣żļĪŻ
źšź¦źķźżź╚ŗēäż“ź│źóź│ź¾źįź┐ź¾ź╣ż╚ż╣żļTDKżŽĪóICź┴ź├źūŲŌē┼┤łČ\Įčż“ŠW├ōżĘż┐Bluetooth SmartźŌźĖźÕĪ╝źļż“ż’ż║ż½3.5mm│čż╬ĮjżŁżĄ(Ė³żĄ1mm)ż╦╝²żßż┐ĪŻż│żņż╦┼┼Ė╗├ōICĪ╩DC-DCź│ź¾źąĪ╝ź┐Ī╦ż╚źóź¾źŲź╩ż“└▄¶öż╣żļż╚żĮż╬ż▐ż▐╗╚ż©żļĪŻ┤Ѭܿ╬źšźņĪ╝źÓŗ╩¼ż╦╝┬äóżĘż┐╬Ńż“Ė½ż╗ż┐(┐▐1)ĪŻŲŌŗż╦żŌDC-DCź│ź¾źąĪ╝ź┐ż“ŲŌē┼Īó─Ń┼┼░ĄŲ░║Ņż╦żĶżĻŠ├õJ┼┼╬üż“═▐ż©żŲżżżļĪŻTDKżŽż│ż╬źŌźĖźÕĪ╝źļ░╩│░żŪżŌĪóŠ«Ę┐ż╬DC-DCź│ź¾źąĪ╝ź┐żõĪó┴„┐«źóź¾źūż╬Š├õJ┼┼╬üż“▓╝ż▓żļČ\ĮčżŪżóżļź©ź¾ź┘źĒĪ╝źūź╚źķź├ź½Ī╝ĪóPANĪ╩personal area networkĪ╦źŌźĖźÕĪ╝źļĪó┼┼Ė╗┤╔═²źŌźĖźÕĪ╝źļż╬ICŲŌē┼┤łźŌźĖźÕĪ╝źļżŌ·t┐āżĘż┐ĪŻTDKż╬ICŲŌē┼Č\Į迎└ż─c┼¬ż╦─Ļähż¼żóżĻĪó║ŻŃQż╬5ĘŅż╦żŽ└ż─c║ŪĮjŠ}ż╬OSATĪ╩╚ŠŲ│öü┴╚ż▀╬®żŲ└ņČ╚ż╬æą╔ķźßĪ╝ź½Ī╝Ī╦żŪżóżļASEż╚─¾Ę╚Īó╣ń╩█▓±╝ęż“└▀╬®żĘż┐ĪŻ

┐▐1ĪĪTDKż¼Ė½ż╗ż┐3.5mm│čż╬Bluetooth SmartźŌźĖźÕĪ╝źļż“┤▐żÓövŽ®┤łż“┤Ѭܿ╬źšźņĪ╝źÓż╦╝┬äó
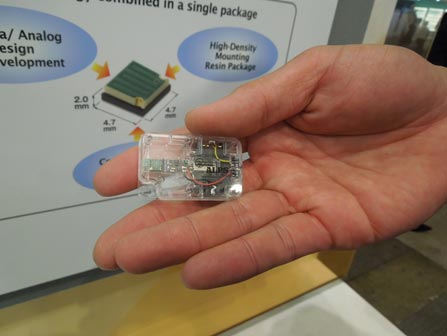
źóźļźūź╣┼┼ĄżżŽŲ▒══ż╩Bluetooth SmartźŌźĖźÕĪ╝źļżŪĪóźóź¾źŲź╩ŲŌē┼ż╬┐Ę×æēäż“·t┐āżĘż┐ĪŻż│żņżŽ4.7mm│čżŪĖ³żĄż¼2mmż╚TDKż╬×æēäżĶżĻżŽŠ»żĘĮjżŁżżż¼źóź¾źŲź╩żŌ┤▐ż¾żŪżżżļĪŻźóź¾źŲź╩ŗ╩¼ż“źŌźĖźÕĪ╝źļż╦ź╣ź┐ź├ź»ż╣żļĘ┴żŪżóżļ(┐▐2)ĪŻBluetoothżõWi-Fiż╬żĶż”ż╦2.45GHz┬ėż“╗╚ż”─╠┐«żŪżŽźóź¾źŲź╩żŌŠ«żĄż»żŪżŁżļĪŻżĮż╬āS─╣żŽż¬żĶżĮ10cmżŪżóżļż½żķ║Ū─ŃĖ┬ż╬1/4āS─╣ż╚żĘżŲ2.5cmż╣ż╩ż’ż┴25mmż╬─╣żĄż¼żóżņżążĶżżĪŻ
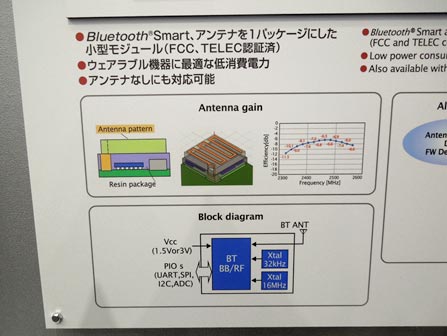
┐▐2ĪĪźóź¾źŲź╩żŌźŌźĖźÕĪ╝źļż╦╝┬äóżĘż┐źóźļźūź╣ż╬Bluetooth SmartźŌźĖźÕĪ╝źļ
źóźļźūź╣żŽĪ󿥿ķż╦43.9mmĪ▀27.2mmĪ▀10.8mmż╬IoTźŌźĖźÕĪ╝źļĪ╩┐▐3Ī╦żŌ×æēä▓ĮżĘż┐ĪŻż│ż╬Š«Ę┐IoTźŌźĖźÕĪ╝źļż╦żŽĪóĄż░ĄĪóča╝Š┼┘ĪóUV/Š╚┼┘Īó6╝┤(▓├Å]┼┘Ī▄├Ž╝¦Ąż)┤Ę└Łź╗ź¾źĄĪóż“┼ļ║▄żĘżŲżżżļĪŻź╗ź¾źĄź═ź├ź╚ź’Ī╝ź»źŌźĖźÕĪ╝źļż╚żĘżŲ│½╚»źŁź├ź╚ż╚żĘżŲ╚╬Ūõż╣żļĪŻź┐źųźņź├ź╚ż╦└ņ├ōźóźūźĻż“źżź¾ź╣ź╚Ī╝źļżĘĪóż│ż╬IoT├╝¼Źż“ź¬ź¾ż╦żĘżŲż¬ż▒żąĪóź┐źųźņź├ź╚żŪ▒R─ĻźŪĪ╝ź┐ż“Ė½żļż│ż╚ż¼żŪżŁżļĪŻż│ż╬źóźūźĻż“─╠żĖżŲź╗ź¾źĄżõ─╠┐«Š“°Pż“└▀─ĻżŪżŁżļĪŻ
┐▐3ĪĪźóźļźūź╣ż╬IoTź╗ź¾źĄ│½╚»źŁź├ź╚
╚ŠŲ│öüźßĪ╝ź½Ī╝ż╬źĒĪ╝źÓżŌżżżĒżżżĒż╩ź╗ź¾źĄźŌźĖźÕĪ╝źļż╚Īóź╗ź¾źĄź╬Ī╝ź╔ż╚ż╩żļIoT├╝¼Źż“│½╚»ż╣żļż┐żßż╬äh▓┴źŁź├ź╚żõĪó920MHzż╬ź▓Ī╝ź╚ź”ź¦źżźŌźĖźÕĪ╝źļż“·t┐āżĘż┐ĪŻź╗ź¾źĄźŌźĖźÕĪ╝źļż╦żŽĪó▓├Å]┼┘ĪóĄż░ĄĪó├Ž╝¦ĄżĪóźĖźŃźżźĒĪ󿥿ķż╦ż│żņżķż“ż╣ż┘żŲĮĖ└čżĘż┐10╝┤źŌĪ╝źĘźńź¾ź╗ź¾źĄźŌźĖźÕĪ╝źļż╩ż╔ż╬ĄĪ│ŻÅUź╗ź¾źĄż╦▓├ż©ĪóŠ╚┼┘ŖZ└▄ź╗ź¾źĄżõź½źķĪ╝ĪóUVż╩ż╔ż╬Ė„ź╗ź¾źĄĪóź█Ī╝źļICĪóča╝Š┼┘ź╗ź¾źĄż╩ż╔ż“├ō┴TżĘż┐ĪŻ
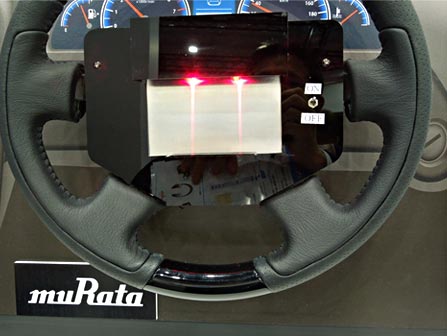
źĘźńĪ╝ż╚żĘżŲĖ½ż╗żļż┐żßż╬Š«Ę┐źĒź▄ź├ź╚(┐▐4)ż╚żĮżņż“öUĖµż╣żļöUĖµ╦└ż“╗Ņ║ŅżĘĪó╦└ż“┐Čżļż╚ĪóźĒź▄ź├ź╚ż¼āĆż“┐ČżļżĘż░żĄż“Ė½ż╗ż┐ĪŻ╦└ż╦żŽ▓├Å]┼┘ź╗ź¾źĄż“╗┼²Xż▒żŲżóżĻĪó▓├Å]┼┘ż“ĖĪĮążĘż┐ż│ż╚ż“BluetoothżŪźĒź▄ź├ź╚ż╦┴„ż├żŲżżżļĪŻźĒĪ╝źÓż╬▓├Å]┼┘ź╗ź¾źĄż╬äėż▀żŽĪóĮĖ└čżĘżŲżżżļDSPż╦Īųź”ź¦Ī╝ź»źóź├źūĪūĪóĪųĖ■żŁż╦Ū¦ē¶ż╣żļĪūĪóĪų1öv/2övż╬ź┐ź├źūź│ź▐ź¾ź╔ĪūĪóĪų─_╬üż╦żĶżļśOĮy═Ņ▓╝Īūż╩ż╔ż╬ĄĪē”ż¼źżź¾ź┐źķźūź╚ż╣żļźóźļź┤źĻź║źÓż“ŠŲżŁ╣■ż¾żŪżżżļż│ż╚ż└ĪŻż─ż▐żĻĪóMEMSź╗ź¾źĄż╦źóźļź┤źĻź║źÓżŌ¤²▓├żĘżŲżżżļĪŻ
![┐▐4ĪĪźĒĪ╝źÓż¼╗Ņ║ŅżĘż┐źĒź▄ź├ź╚żŽĪó▓├Å]┼┘ź╗ź¾źĄż“╗┼²Xż▒ż┐╦└ż“┐Čżļż╚āĆż“┐Čżļ](/archive/editorial/industry/img/INC151013-01d.jpg)
┐▐4ĪĪźĒĪ╝źÓż¼╗Ņ║ŅżĘż┐źĒź▄ź├ź╚żŽĪó▓├Å]┼┘ź╗ź¾źĄż“╗┼²Xż▒ż┐╦└ż“┐Čżļż╚āĆż“┐Čżļ
õø┼─×æ║ŅĮĻżŽĪóŲ¾ż─ż╬źčźļź╣┼┼░Ąż“╚»Ö┌żĄż╗ĪóżĮż╬║╣ż╚Ž┬żŪ360┼┘öv┼Šż╬ź©ź¾ź│Ī╝ź└ż╚żĘżŲ║ĖīÜż╬░╠Åøż“ĖĪĮąż╣żļź▐źżź»źĒź▌źĖźĘźńź¾ź╗ź¾źĄż“│½╚»żĘż┐ĪŻ1öv┼Š┼÷ż┐żĻ6ź╣źŲź├źūż╬ź©ź¾ź│Ī╝ź└ż╚ż╣żļŚlż└ż¼Īóź╗ź¾źĄĄĪē”ż“┼┼╗ęövŽ®ż╬źčźļź╣ż╬╚»Ö┌Ī”öUĖµżŪ£pż▒Ęeż─ĪŻ┤Ѭܿõ╗■╝ŖĪóźžź├ź╔źšź®ź¾Īóź½źßźķż╩ż╔ż╦äóŠÆżĘżŲĪóź╣ź▐Ī╝ź╚ź░źķź╣ż╩ż╔ż╦źóźżź│ź¾▓Ķ楿╩ż╔ż“▒ŪżĘĮążĘżĮżņż“┴Ó║Ņż╣żļż╬ż╦╗╚ż”źŪźŌż“Ė½ż╗ż┐ĪŻ
źÓźķź┐żŽ┘Z║▄Ą£Č╚żŌäė▓ĮżĘżŲżżżļĪŻGPS┐«ęÄż¼ŲŽż½ż╩żżź╚ź¾ź═źļżõ├Ž▓╝╠Oż╦Ų■ż├ż┐Šņ╣ńżŪżŌĪó▓├Å]┼┘Ī”źĖźŃźżźĒź╗ź¾źĄż╚Ąż░Ąź╗ź¾źĄżŪĪ󟻟ļź▐ż╬░╠Åøż“ź╚źķź├źŁź¾ź░ż╣żļźŪźŌż“╣įż├ż┐ĪŻ▐Z╠Ożõź╚ź¾ź═źļż╬żóżļĖ“║╣┼└ż╩ż╔żŪżŌ┘抒ż╦┴÷╣įżŪżŁżļĪŻ▓├ż©żŲĪóADAS├ōż╬źĖź¦ź╣ź┴źŃĪ╝UIż“╗╚ż├żŲźžź├ź╔źóź├źūźŪźŻź╣źūźņźżż╦╔Į┐āż╣żļźŪźŌżõĪó5.9GHz┬ėż╬V2XĪ╩┘Z┘Z┤ųĪ”Ž®┘Z┤ųĪ╦─╠┐«żŪźąźżź»ż“ĖĪĮąż╣żļźŪźŌżŌĖ½ż╗ż┐ĪŻ
żĄżķż╦źŽźūźŲźŻź»ź╣ź╗ź¾źĄżŌĖ½ż╗ż┐ĪŻż│żņżŽĪó░Ą┼┼┴Ū╗ęż“Ų░║ŅżĄż╗żļż│ż╚żŪźųźļźųźļ┤Čż“╗žż╦┤ČżĖżĄż╗żļżŌż╬ż└ż¼ĪóźŪźŌżŪżŽźņĪ╝źČĪ╝Ė„ż“╗žż¼─╠āįż╣żļż╚źųźļźųźļ┤Čż“öü┤ČżŪżŁżļ(┐▐5)ĪŻiPhone 6SżŪAppleż¼─¾ČĪż╣żļź┐źūźŲźŻź»ź╣ż╬┐ČŲ░żŽź│źżźļż“╗╚ż├ż┐źĮźņź╬źżź╔żŪżóż├ż┐ż¼ĪóCEATECżŪżŽ░Ą┼┼ź╗źķź▀ź├ź»żŪż│ż╬┐ČŲ░ż“╝┬ĖĮż╣żļ╬Ńż¼¾Hż½ż├ż┐ĪŻż│żņż½żķż╬ź╣ź▐Ī╝ź╚źšź®ź¾ż“żŽżĖżßż╚ż╣żļźµĪ╝źČĪ╝źżź¾ź┐źšź¦Ī╝ź╣ż╦żŽż│ż╬źŽźūźŲźŻź»ź╣ż“ŠW├ōż╣żļ╬Ńż¼╗\ż©żļż│ż╚ż“═Į┤ČżĄż╗żŲżżżļĪŻ
┐▐5ĪĪ╗žż¼źņĪ╝źČĪ╝Ė„ż“▓Ż└┌żļż╚Ū“żż░Ą┼┼ź╗źķź▀ź├ź»ż¼┐ČŲ░żĘżŲźųźļźųźļ┤Čż“┤ČżĖżļĪĪõø┼─×æ║ŅĮĻż╬źųĪ╝ź╣
źÓźķź┐żŽżĄżķż╦ĪóźĮźšźĪżõź┘ź├ź╔ż╬▓╝ż╦╣Ō┤Č┼┘ż╬▓├Å]┼┘ź╗ź¾źĄż“ŲDżĻ¤²ż▒Īó┤ĄŪvż╬┐┤Ū’┐¶ż“ĖĪĮąż╣żļż╚żżż”źŪźŌżŌ╣įż├ż┐ĪŻ▓├Å]┼┘ź╗ź¾źĄ┐«ęÄż╬┴T╠Żż“═²▓“ż╣żļż┐żßż╬źóźļź┤źĻź║źÓżŌźĮźšź╚ź”ź©źóż╦┼ļ║▄żĘżŲżżżļVTIż╬MEMSź╗ź¾źĄż“├ōżżż┐ĪŻźÓźķź┐żŽĒ×▓żż╬VTI╝ęż“āA╝²żĘżŲż¬żĻĪóMEMSź╗ź¾źĄĪ▄źóźļź┤źĻź║źÓČ\Įčż“Š}ż╦Ų■żņżŲżżżļĪŻ┐▓╩ųżĻż╩ż╔ż╬ź╬źżź║ż¼Š’ż╦Įążļż┐żßĪóź╬źżź║ż“æ]ż┴Š├ż╣ż┐żßż╦∙ZŽ½żĘż┐ż╚żżż”ĪŻ
ģ╬═█═Č┼┼żŽĪó░Ą┼┼┴Ū╗ęż“╗╚ż├ż┐ź╗ź¾źĄżõźóź»ź┴źÕź©Ī╝ź┐ż“║ŅżĻĪóź╗ź¾źĄżŽź»źļź▐ż╬źĘĪ╝ź╚ż╩ż╔żžż╬▒■├ōĪóźóź»ź┴źÕź©Ī╝ź┐żŽ╣Ō▓╗ź─źŻĪ╝ź┐Ī╝(┐▐6)żžż╬▒■├ōż“Ė½ż╗ż┐ĪŻź»źļź▐ż╦źĘĪ╝ź╚żžż╬▒■├ōżŪżŽĪóź╗ź¾źĄż“6Ė─Īó░ž╗ęż╬ŪžżõÕüż╬ŗ╩¼ż╩ż╔ż╦└▀ÅøżĘĪóź╔źķźżźąż╦╣ńż├ż┐źĘĪ╝ź╚ż╬░╠Åøż“öUĖµż╣żļż╬ż╦╗╚ż”ĪŻ6Ė─ż╬ź╗ź¾źĄż½żķż╬┐«ęÄż“Bluetooth LEĪ╩Low EnergyĪ╦żŪź┐źųźņź├ź╚ż╦┴„żĻĪóżĮżņżķż“Ė½żļż│ż╚ż¼żŪżŁżļĪŻ
┐▐6ĪĪ░Ą┼┼┴Ū╗ęż“źóź»ź┴źÕź©Ī╝ź┐ż╦╗╚ż├ż┐ź─źŻĪ╝ź┐ź╣źįĪ╝ź½Ī╝ØŖ└Ł
ź▀ź─ź▀┼┼ĄĪżŽĪó79GHzż╬ź▀źĻāSźņĪ╝ź└Ī╝ż“╗╚ż├żŲ╩Ō╣įŪvż“ĖĪĮąż╣żļźĘź╣źŲźÓ(┐▐7)ż“╗Ņ║ŅżĘż┐ĪŻźņĪ╝ź└Ī╝żŽĖĄĪ╣ĪóČŌō’ż╩ż╔╔wżżżŌż╬ż¼Ų░żżżŲżżżļŠņ╣ńż╬╚┐╝oāSż“ĖĪĮąż╣żļź─Ī╝źļżŪżóżļż¼Īó90%░╩æų┐Õ╩¼żŪżŪżŁżŲżżżļ┐═öüżŪżĄż©ŖZż»ż╩żķĪóżĮż╬╚┐╝oāSż“ĖĪĮążŪżŁżļĪŻź▀ź─ź▀żŽżŪżŌ▓±ŠņżŪ5mż▐żŪż╬┐═ż╬Ų░żŁż“ĖĪĮążĘ╔Į┐āż╣żļźŪźŌż“Ė½ż╗ż┐ż¼Īó╝┬╬üżŽ30mµć┼┘ż▐żŪżŽĖĪĮą▓─ē”ż└ż╚żĘżŲżżżļĪŻ

┐▐7ĪĪź▀ź─ź▀ż¼╗Ņ║ŅżĘż┐79GHzż╬źņĪ╝ź└Ī╝┴„┐«ĄĪ(║Ėż╬ĀC)ż╚żĮż╬╚┐╝oāSż“£pż▒żļ£p┐«ĄĪ(īÜż╬ĀC)
ŗēäźņź┘źļżŪżŽģ╬═█═Č┼┼ż¼Īó1000µFż╚Įj═Ų╬╠ż╬└č┴žź╗źķź▀ź├ź»ź│ź¾źŪź¾źĄż“·t┐āżĘż┐ż¼ĪóżĮż╬ĮjżŁżĄżŽż’ż║ż½4.5mmĪ▀3.2mmżĘż½ż╩żżĪŻźóźļź▀┼┼▓“ź│ź¾źŪź¾źĄ╩┬ż▀ż╬═Ų╬╠ż╩ż╬ż╦Īóż│żņż█ż╔Š«żĄż╩ź│ź¾źŪź¾źĄżŽż│żņż¼Č▓żķż»ż│żņż▐żŪż╬║ŪŠ«ż╚żżż”ż│ż╚ż╦ż╩żĒż”ĪŻ╝┬║▌ż╬└Łē”ż╚żĘżŲ╣Ō╝■āSØŖ└Łż╩ż╔żŽż│żņż½żķ▒R─Ļż╣żļż╚żĘżŲżżżļĪŻ
źčź╩źĮź╦ź├ź»ż╚╔┘╗╬─╠ź╗ź▀ź│ź¾ź└ź»ź┐Ī╝ż╬SoCŗ╠ńż¼║ŻŃQż╬3ĘŅż╦╣ń±éĪ”├┬Ö┌żĘż┐╚ŠŲ│öüźßĪ╝ź½Ī╝ż╬źĮźĘź¬ź═ź»ź╣ź╚żŽĪ󟻟ļź▐ż╬├¾┘Zż“Õ\ż▒żļźĄźķź”ź¾ź╔źėźÕĪ╝źŌź╦ź┐Ī╝Č\Įčż╚żĮżņż“īÖż½żĘĪóµ£╝■░Žż╦żżżļ┐═ż“Ū¦╝▒żĘĪóżĮż╬┐¶ż“┐¶ż©żļ├ō²ŗż╦żŌ╗╚ż©żļż│ż╚ż“źŪźŌżĘż┐ĪŻźŪźĖź┐źļźĄźżź═Ī╝źĖż╩ż╔ż╬Øiż╦żżżļ┐═┐¶żõ╣ų▒ķż╩ż╔ż“─░ż»┐═┐¶ż╬Ū─É█ż╩ż╔ż╦żŌ╗╚ż©żļĪŻ┐═┤ųż╬ØŖ─╣żŪżóżļų`ż╚éŃż╚Ė²ż“Ū¦╝▒ż╣żļż│ż╚żŪ┐═┤ųż╚╚Įéāż╣żļĪŻźŪĪ╝ź┐ĮĶ═²żŪżŽĪó┐═┤ųż“£½░┼źŪĪ╝ź┐ż╚żĘżŲĮĶ═²ż╣żļż┐żßĪóźūźķźżźąźĘĪ╝ż“╝ķżļż│ż╚ż¼żŪżŁżļĪŻ
CEATECµ£öüżŪżŽżõżŽżĻź╗ź¾źĄż╬Įąēäż¼¾Hż½ż├ż┐ż¼ĪóźĮźĘź¬ź═ź»ź╣ź╚żŽ24GHzż╬źĄźųź▀źĻāSż“╗╚ż├ż┐ź╔ź├źūźķĪ╝źņĪ╝ź└Ī╝ż╦żĶżļ┐═ż╬ĖĪĮąż“ż│żņż▐żŪ┐āżĘżŲżŁż┐ż¼Īó║ŻövżŽ┐┤Ū’ż╚ĮųżŁż“ĖĪĮążŪżŁżļż│ż╚ż“┐āżĘż┐ĪŻ┐┤┬Īż¼╝²Į╠Ī”äP─╣ż“Ę½żĻ╩ųż╣ż│ż╚ż╦żĶż├żŲĪóźņĪ╝ź└Ī╝āSż╬š{▀`ż¼ż’ż║ż½ż╩ż¼żķ╩čż’żļż┐żßĪóżĮż╬╩č▓Įż“┐┤Ū’ż╚Ū¦╝▒ż╣żļĪŻż▐ż┐ĪóĮųżŁżŌĖĪĮążŪżŁżļż╚żĘżŲżżżļĪŻ
┴ĒżĖżŲCEATECżŪżŽĪóŗēäźßĪ╝ź½Ī╝ż¼źŌźĖźÕĪ╝źļż“║Ņżļ╝┬╬üż“Ė½ż╗Īó├▒ż╩żļŗēäż└ż▒ż“·t┐āżĘżŲżżż┐ż│żņż▐żŪż╚żŽĮjżŁż»░Ńż”ĪŻźŌźĖźÕĪ╝źļżõźĘź╣źŲźÓż“Ū─É█ż╣żļż│ż╚żŪĪóŗēäżõźŌźĖźÕĪ╝źļż“źĘź╣źŲźÓ─¾░ŲżŪżŁżļĪŻż│ż│ż¼ŗēäźßĪ╝ź½Ī╝ż╬Īų╔nż░╬üĪūż╚ż╩ż├żŲżżżļĪŻ