U-bloxż¼ź╗ź¾ź┴źßĪ╝ź╚źļ╗@┼┘ż╬▒R░╠źĘź╣źŲźÓż“įÆ╔®┼┼ĄĪż╚Č”Ų▒│½╚»żž
Ä┼└▒ż╦żĶżļ░╠Åø╝Ŗ▒RźĘź╣źŲźÓż¼ä▌¤®╗┼══ż╬GPSż½żķĪóĘQ╣±żŪæ]ż┴æųż▓ż┐Ä┼└▒ż╬GNSSöĄ╝░żžż╚öĪ╣įż¼╗Žż▐ż├żŲżżżļĪŻ╣±ŲŌżŪżŌØŹÜW─║Ä┼└▒źĘź╣źŲźÓż╬─¾ČĪż¼╗Žż▐żĒż”ż╚żĘżŲżżżļĪŻ╗@┼┘ż“ź╗ź¾ź┴źßĪ╝ź╚źļźņź┘źļż▐żŪ╣ŌżßżŲżżżļż│ż╚ż¼║ŪĮjż╬ØŖ─╣ż└ĪŻż│ż╬▒R░╠ź┴ź├źūż╬│½╚»żŪįÆ╔®┼┼ĄĪż╚ĪóGPS▒R░╠źĘź╣źŲźÓĮjŠ}ż╬ź╣źżź╣U-blox╝ęż¼─¾Ę╚żĘż┐ĪŻ
“£═Ķż╬GPSżŽä▌¤®╗┼══żŪĪó╗@┼┘ż“═Įżß═Ņż╚żĘżŲżżż┐ĪŻźĻź╣ź»övķcż╬ż┐żßż└ĪŻź½Ī╝ź╩źėź▓Ī╝źĘźńź¾ż╦ŠW├ōżĄżņżŲż½żķĪóźŪźŻźšźĪźņź¾źĘźŃźļĪ╩║╣╩¼öĄ╝░Ī╦GPSöĄ╝░ż“║╬├ōĪó╗@┼┘ż“Ø▓┐¶źßĪ╝ź╚źļż╦æųż▓żŲżżżļż¼Īóźėźļżõܬ½Fż“ØŖ─Ļż╣żļż╦żŽż│żņżŪżŌż▐ż└╔įØ▓╩¼ĪŻżĄżķż╦║ŻĖÕĪó─_═ūż╚ż╩żļśOŲ░▒┐┼ŠĪ╩śO╬®┴÷╣įĪ╦ż╦ż╚ż├żŲĪó╗@┼┘ż“ź╗ź¾ź┴źßĪ╝ź╚źļĄķż╦æųż▓ż╩ż▒żņżąĪ󟻟ļź▐Ų▒╗╬ż╬ŠūŲ═żŽķcż▒żķżņż╩żżĪŻ
┐▐1ĪĪU-bloxź╚įÆ╔®┼┼ĄĪż¼Č”Ų▒żŪ│½╚»ż╣żļź╗ź¾ź┴źßĪ╝ź╚źļĄķż╬▒R░╠źĘź╣źŲźÓĪĪĮąųZĪ¦įÆ╔®┼┼ĄĪĪóU-blox
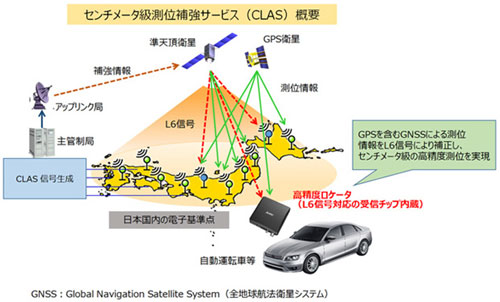
żĮż│żŪŲŌ░VĮB▒¦├Ķ│½╚»└’ŠS┐õ┐╩Ą£ē»Č╔żŽØŹÜW─║Ä┼└▒źĘź╣źŲźÓż“╗╚ż├ż┐▒R░╠źĄĪ╝źėź╣ż╬▐k┤─ż╚żĘżŲĪóĪųź╗ź¾ź┴źßĪ╝ź┐Ąķ▒R░╠▌öäėźĄĪ╝źėź╣Ī╩CLASĪ╦ĪūĪ╩┐▐1Ī╦ż“2018ŃQ┼┘ż½żķ│½╗Žż╣żļ═Į─Ļż“╬®żŲżŲżżżļĪŻśOŲ░▒┐┼Šż╦żŽĪó╠OŽ®ż╦▐pż├ż┐┘ć│╬ż╩░╠ÅøŠ╩¾żŽź▐ź╣ź╚żŪżóżĻĪóżĮż╬ż┐żßż╬▒R░╠źĘź╣źŲźÓż“ØŹ×óżĘżŲż¬ż│ż”ż╚żżż”Ślż└ĪŻ
ź╗ź¾ź┴źßĪ╝ź╚źļĄķż╬ĖĒ║╣╗@┼┘ż“ØŁ═ūż╚ż╣żļż┐żßĪó▓żä”żõŲ³╦▄Īó├µ╣±ż╩ż╔ż¼GPSż╦┬Õż’żļĪóśOØiż╬Ä┼└▒ż“æ]ż┴æųż▓żŲżŁż┐ĪŻÄ┼└▒ż╦żĶżļ▒R░╠┐«ęÄż└ż▒żŪżŽż╩ż»Īó┘Jē¶ż╬┼┼╗ę┤ØŹ┼└Ī╩ź╗źļźķĪ╝ź═ź├ź╚ź’Ī╝ź»ż╬żĶż”ż╩┤├ŽČ╔Ī╦ż½żķ┤ØŹż╚ż╩żļ┐«ęÄżŌŠW├ōżĘżŲ╗@┼┘ż“æųż▓żļĪŻĘQ┤├ŽČ╔ż½żķż╬┐«ęÄż“ź▓Ī╝ź╚ź”ź¦źżż╬żĶż”ż╩╝ń┤╔Č╔ż½żķÄ┼└▒ż╦▌öäė┐«ęÄż╚żĘżŲ┴„żĻĪóÄ┼└▒ż½żķĘQ┤ØŹ┼└ż╦┐«ęÄ┼┼āSż“┴„żĻĪóżĮż╬║╣╩¼ż“ż╚żļż│ż╚żŪ╗@┼┘ż“╣ŌżßżŲżżżļĪŻ

┐▐2ĪĪU-bloxż╬Č”Ų▒┴ŽČ╚Ūvż╬Daniel AmmannĢ■
CLASżŪżŽĪó├µ┐┤╝■āS┐¶1278.75MHzż╬L6┐«ęÄż“▒R░╠▌öäėźŪĪ╝ź┐ż╚żĘżŲŠW├ōż╣żļĪŻÄ┼└▒ż½żķż╬┐«ęÄżŽ║Ū─Ń4ż─ØŁ═ūż└ż¼ĪóØŹÜW─║Ä┼└▒ż½żķż╬┐«ęÄżŽ▌ö┘ć├ōż╬L6ż“┤▐żßĪó6ż─ŠW├ōż╣żļż╚żżż”ĪŻ2018ŃQ4ĘŅż½żķż╬CLASźĄĪ╝źėź╣ż¼╗Žż▐żĻĪó┐¶ź§ĘŅżĘżŲ┤░µ£Ū¦─Ļż¼▓─ē”ż╦ż╩ż├ż┐żķĪó│░╚╬żŌ╣įż”ż─żŌżĻż└ż╚U-bloxż╬Č”Ų▒┴ŽČ╚Ūvż╬▐k┐═Daniel AmmannĢ■Ī╩┐▐2Ī╦żŽĖ└ż”ĪŻ
![┐▐3ĪĪU-blox╝ęż╬▓├Å]┼┘/źĖźŃźżźĒż╬ź╗ź¾źĄż“┤▐żÓGNSS£p┐«źŌźĖźÕĪ╝źļ](/archive/editorial/industry/img/INC161004-01c.jpg)
┐▐3ĪĪU-blox╝ęż╬▓├Å]┼┘/źĖźŃźżźĒż╬ź╗ź¾źĄż“┤▐żÓGNSS£p┐«źŌźĖźÕĪ╝źļ
U-bloxżŽ║ŪĮķż╬ØŹÜW─║Ä┼└▒Īųż▀ż┴żėżŁĪūż½żķż╬GNSSźņźĘĪ╝źąź┴ź├źūż╚żĘżŲĪóNEO-M8UĪ╩┐▐3Ī╦ż“8ĘŅż╦źĻźĻĪ╝ź╣żĘżŲżżżļĪŻÄ┼└▒ż½żķż╬┐«ęÄż¼ŲŽż½ż╩żżź╚ź¾ź═źļż╩ż╔ż“─╠āįż╣żļ╗■żŪżŌĪóŲŌē┼ż╬▓├Å]┼┘ź╗ź¾źĄż╚źĖźŃźżźĒź╗ź¾źĄż“╗╚ż├żŲĪó░╠Åøż“┐õ─Ļż╣żļUDRĪ╩Untethered Dead ReckoningĪ╦Æņ╦ĪČ\ĮčżŌ┼ļ║▄żĘżŲżżżļĪŻ