┼ņĮj(lu©░)ź░źļĪ╝źūĪóĮ╝┼┼ź│źżźļż“╠OŽ®ż╦ļm└▀ĪóEVż╬ź’źżźõźņź╣Ąļ┼┼ż“╝┬┘x
ż▐ż┐▐kż─┐ʿʿżĘ┴▌åż╬┼┼ĄżśOŲ░┘Zż¼żŪżŁż┐ĪŻ┼ņ»BĮj(lu©░)│žżŽĪóźĒĪ╝źÓĪóźųźĻźĖź╣ź╚ź¾ĪóŲ³╦▄╗@╣®Īó┼ņ═╬┼┼ĄĪ×æļ]ż╚Č”Ų▒żŪĪó┴÷╣į├µż╦╠OŽ®ż½żķź’źżźõźņź╣Ąļ┼┼ż╦żĶż├żŲ┼┼ĄżśOŲ░┘ZĪ╩EVĪ╦ż“┴÷żķż╗żļż╚żżż”╝┬┘xż“╣įż├ż┐(┐▐1)ĪŻż’ż║ż½ż╩═Ų╬╠ż╬┼┼├ėż“┼ļ║▄ż╣żļż└ż▒żŪ║čżÓæųż╦ĪóŠ«żĄż╩═Ų╬╠ż╬┼┼├ėżŪżĄż©EVż╬┴÷╣įš{(di©żo)▀`ż╦żŽ┤žĘĖż¼ż╩ż»ż╩żļż╚żżż”źßźĻź├ź╚ż¼żóżļĪŻ

┐▐1ĪĪ╠OŽ®ż╦ļmżß╣■ż¾ż└Į╝┼┼ź│źżźļż╬æųż╦EVż¼═Ķżļż╚Į╝┼┼ż¼╗Žż▐żļ
║Żövż╬╝┬┘xżŪżŽĪó╠OŽ®ż╦ź’źżźõźņź╣Ąļ┼┼├ōż╬ź│źżźļż“2Ī┴3źßĪ╝ź╚źļż¬żŁż╦ļmżß╣■ż▀Īó╝¦ĄżČ”╠─ż╦żĶż├żŲ85kHzż╬┼┼╝¦āSż“╚»╝o(j©¼)żĘż┐ĪŻżĮżņż“ź»źļź▐ŖõżŪ£pż▒ŲDżĻ┼┼╬üż╚żĘżŲŠW(w©Żng)├ōż╣żļĪŻ╚¶żąż╣š{(di©żo)▀`żŽ10cmµć┼┘ĪŻż▐żļżŪ┼┼┘Zż╬▓═└■ż╬żĶż”ż╦┼┼╬üż“ČĪĄļż╣żļż│ż╚ż╦ż╩żļż¼Īó▓═└■ż╬┬Õż’żĻż╦ź’źżźõźņź╣Ąļ┼┼ż╣żļĪŻ
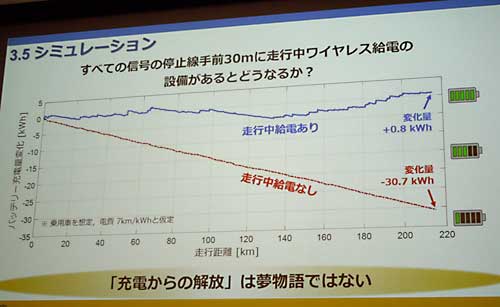
ż┐ż└żĘĪó╠OŽ®ż╣ż┘żŲ┼Žż├żŲź│źżźļż“╔▀└▀ż╣żļØŁ═ūżŽż╩ż»Īó╬Ńż©żą┐«ęÄ(gu©®)ĄĪż╬Š}ØiżŪżŽ─õ┘VżĘżŲżżżļż┐żßĪóżĮż│żŪĄļ┼┼ż╣żļż│ż╚ż╦żĶżĻĪó┴÷╣į├µż╦Ąļ┼┼żĘż╩ż»żŲżŌ║čżÓżĶż”ż╦ż╩żļĪŻ┼ņĮj(lu©░)ż╬╗ŅōQż╦żĶżļż╚Īóµ£żŲż╬┐«ęÄ(gu©®)ĄĪż╬Š}Øi30źßĪ╝ź╚źļ├Ž┼└ż╦ź’źżźõźņź╣Ąļ┼┼└▀×óż“ż¬żŁĪó┼┼õJ7km/kWhż╚▓Š─ĻżĘżŲ220kmż“┴÷ż├żŲżŌĪóźąź├źŲźĻż╬Į╝┼┼┼┼▓┘╬╠żŽż█ż╚ż¾ż╔╩č▓ĮżĘż╩żż(┐▐2)ĪŻżĘż½żĘĪó┴÷╣į├µż╦Ąļ┼┼żĘż╩ż▒żņżąŲ▒żĖŠ“°Pż└ż╚ĪóEVż╬źąź├źŲźĻżŽ30kWh╩¼ż╬═Ų╬╠ż¼žō(f©┤)ż├żŲżĘż▐ż”ĪŻż│ż╬źĘź▀źÕźņĪ╝źĘźńź¾żŪżŽĪóµ£┴÷╣į╗■┤ųż╬25%ż╬╗■┤ųż╦ź»źļź▐ż¼Ąļ┼┼ŠņĮĻż╦─õ┘VżĘżŲżżż┐ż╚▓Š─ĻżĘżŲżżżļĪŻ
┐▐2ĪĪĖ“║╣┼└żŪż╬─õ┘V├µż╦Į╝┼┼żŪżŁżļźĘź╣źŲźÓż¼═²„[┼¬ĪĪĮąųZĪ¦┼ņ»BĮj(lu©░)│ž
╝┬żŽĪóEVż╬ź’źżźõźņź╣Ąļ┼┼źĘź╣źŲźÓż╬╝┬┘xżŽ▓żä▌ż“├µ┐┤ż╦└ż─cĘQ╣±żŪ╣įż’żņżŲż¬żĻĪó║YØŹæä│╩żŽż▐ż└żŪżŁżŲżżż╩żżĪŻ┴„┐«ź│źżźļż╚£p┐«ź│źżźļż╚ż╬┤ųż╬š{(di©żo)▀`ż¼ż’ż║ż½żŪżŌ▀`żņżļż╚Ąļ┼┼Ė·╬©żŽĮj(lu©░)żŁż»ĄK▓Įż╣żļĪŻ▓żä▌ż╬╝┬┘xżĶżĻżŌ┐╩▓ĮżĄż╗żļż┐żßż╦║ŻövżŽźżź¾ź█źżĪ╝źļźŌĪ╝ź┐ż╦┴╚ż▀╣■ż¾ż└ĪŻż│żņżŽĪóź┐źżźõź█źżĪ╝źļż╬├µż╦źżź¾źąĪ╝ź┐ż╚źŌĪ╝ź┐ż“Ų■żņż┐EVżŪżóżļĪŻ“£═Ķż╬EVżŽĪóźżź¾źąĪ╝ź┐ż╚źŌĪ╝ź┐żŽź»źļź▐ż╬ĖÕöĄ(sh©┤)ŗż╩ż╔ż╦└▀ÅøżĄżņżŲż¬żĻĪóżĮż╬╩¼ż└ż▒┘ZŲŌż¼Č╣ż»ż╩żļż╚żżż”’L(f©źng)┼└ż¼żóż├ż┐ĪŻźżź¾ź█źżĪ╝źļźŌĪ╝ź┐żŽĪó┘ZŲŌȧ┤ųż¼╣Łż¼żĻĪóżĘż½żŌ4åĶżóżļżżżŽ2åĶŲ╚╬®żŪŲ░ż»ż┐żßĪó┘ZåĶż“90┼┘┐┐▓Żż╦Ė■ż▒żŲ┴÷żļż│ż╚żĄż©▓─ē”ż╦ż╩żļĪŻ
║Żövż╬╝┬┘xżŪ├ōżżżļ£p┐«ź│źżźļż╬└▀ÅøŠņĮĻż“ź█źżĪ╝źļż╬ŲŌŗż╚│░ŗż╬Ų¾ż─ż╬ź¬źūźĘźńź¾ż“└▀ż▒ż┐Ī╩┐▐3Ī╦ĪŻ│░ŗż╦Åøż»öĄ(sh©┤)╝░ż└ż╚┘J┘Tż╬ź┐źżźõż╚ź█źżĪ╝źļż¼╗╚ż©żļĪŻż▐ż┐Īóź█źżĪ╝źļŲŌŗż╦ź│źżźļż“└▀ż▒żļż╚Īó│░ćĶżŽźĘź¾źūźļż╦ż╩żļż¼ź┐źżźõż╚ź█źżĪ╝źļČ”ż╦Č\Įč│ū┐Ęż¼ØŁ═ūż╦ż╩żļĪŻ║Żövż╬╝┬┘xżŪżŽĪó┐▐3║ĖŖõż╬żĶż”ż╦ź█źżĪ╝źļż╬│░ż╦Įąż╣öĄ(sh©┤)╝░ż“╗╚ż├ż┐ĪŻż│ż╬öĄ(sh©┤)╝░żŪżŽ╠OŽ®ż╦õü▒·ż¼żóż├żŲżŌ┘ZåĶż╬ź█źżĪ╝źļż╦└▄żĘżŲ£p┐«ź│źżźļż“└▀ż▒żļż│ż╚ż¼żŪżŁżļż┐żßĪó┴„┐«ź│źżźļż╚ż╬š{(di©żo)▀`żŽ╩▌ż┐żņżļĪŻ
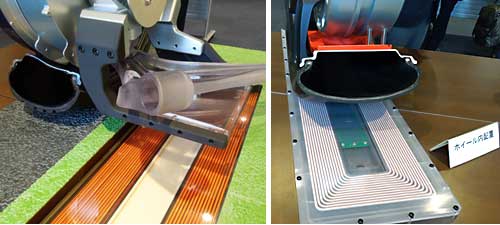
┐▐3ĪĪ£p┼┼ź│źżźļż“ź█źżĪ╝źļż╬│░(║Ė)ż╚Īóź█źżĪ╝źļż╬├µ(īÜ)ż╦Åøż»Šņ╣ńż¼żóżļ
ź’źżźõźņź╣Ąļ┼┼ż╬╝┬┘xżŪ¼ś┘V╗■ż╦żŽĪóĄļ┼┼┼┼╬ü20kWżŪĖ·╬©żŽ92.5%ż╦├ŻżĘż┐ĪŻ║ŻĖÕżŽź│źżźļż╬▓■╬╔ż╩ż╔żŪ95%ż╦▓■║¤żĘż┐żżż╚żżż”ĪŻ
źżź¾źąĪ╝ź┐ż╦żŽĪóźĒĪ╝źÓż¼│½╚»żĘż┐1200VĪó400Aż╬SiCźŌźĖźÕĪ╝źļż“┼ļ║▄żĘżŲżżżļĪŻIGBTżĶżĻżŌĖ·╬©ż¼╣Ōż»ĪóŠ«Ę┐▓ĮżŪżŁżļż┐żßż└ĪŻ│½╚»żĘż┐SiCźŌźĖźÕĪ╝źļżŽ62mmĪ▀34mmĪ▀11mmĪ╩╣ŌżĄĪ╦ż╚Š«żĄż»ĪóźĒĪ╝źÓż¼╬╠ŠÅ├µż╬SiCźŌźĖźÕĪ╝źļż╬1/5ż╬źĄźżź║żĘż½ż╩żżĪŻż│ż│ż▐żŪŠ«żĄż»żŪżŁż┐ż╬żŽĪóź┴ź├źūż“╝┬äóż╣żļ┤łż╦┐ʿʿżČ\ĮčĪ╩ż│żņż╦ż─żżżŲżŽĖņżķż╩żżĪ╦ż“╗╚żżĪó╩ęĀC╬õĄčżŪżŌĪó“£═Ķēäż╬╬ŠĀC╬õĄčżĶżĻżŌ─ŃżżÕX°BŃ^ż“╝┬ĖĮżĘż┐ż½żķż└ĪŻżĘż½żŌĪó-40°CĪ┴+150°Cż╬ča(b©│)┼┘źĄźżź»źļ╗Ņ┘xż“1500övĘ½żĻ╩ųżĘżŲżŌź┴ź├źūča(b©│)┼┘żŽæųĖéżĘż╩ż½ż├ż┐ĪŻ
║Żövż╬╝┬┘xżŪżŽĪóźąź├źŲźĻ═Ų╬╠ż“Š»ż╩ż»żĘżŲżĮż╬─_╬╠ż“Ę┌ż»żŪżŁżļż┐żßĪó┘Zöüµ£öüż╬─_╬╠żŽ30%žō(f©┤)Š»ż╣żļż╚Ė½└čżŌż├żŲżżżļĪŻźżź¾ź█źżĪ╝źļźŌĪ╝ź┐ż╦żĘż┐ż│ż╚żŪź╚źķź¾ź╣ź▀ź├źĘźńź¾ÅUż╬Ņ~Ų░ŗēäż¼žō(f©┤)żļż┐żßżŪżŌżóżļĪŻ