InfineonĪóŠūŲ═╦╔┘Vź▀źĻāSźņĪ╝ź└Ī╝╗■┬Õ┼■═Ķż“ļxĖ└
ź»źļź▐ż╬╝■░Žż╬ĖĪĮąż╦ź▀źĻāSźņĪ╝ź└Ī╝ż¼╗╚ż’żņżļżĶż”ż╦ż╩ż├żŲżŁż┐ż¼ĪóżĮż╬ŪžĘ╩ż╦żŽ╚ŠŲ│öüż╬ĮĖ└č┼┘Ė■æųż╦żĶżļ─Ńź│ź╣ź╚Č\Įčż¼żóżļĪŻ╣Ō▓┴ż╩GaAsż╦┬Õż©żŲŖW▓┴ż╩Si-Geż╦ü÷ż©Īó╝Īż╦RFövŽ®ż╬╣ŌĮĖ└č▓Įż╦żĶż├żŲź▀źĻāSźņĪ╝ź└Ī╝ż╬─Ń▓┴│╩▓Įż“ĖÕ▓ĪżĘżĘżŲżŁż┐ĪŻź»źļź▐├ō╚ŠŲ│öüż╦äėżżInfineon TechnologiesżŽĪóź▀źĻāSźņĪ╝ź└Ī╝ż╬╗■┬Õż¼żõż├żŲżŁż┐ż╚ļxĖ└ż╣żļ(┐▐1)ĪŻ

┐▐1ĪĪInfineon Technologiesż╬ź»źļź▐├ōż╬ź╗ź¾źĄŗ╠ńż“╬©żżżļRalf BornefeldĢ■
┼┼╝¦āSż╬āS─╣ż¼ź▀źĻźßĪ╝ź╚źļ├▒░╠ż╦ż▐żŪø]ż»ż╩żļż╚Īóźóź¾źŲź╩└▀╝Ŗż¼Š«Ę┐ż╦ż╩żļĪŻĖ„ż╬Å]┼┘żŽ3Ī▀10ż╬10ŠĶcm/sżŪżóżļż½żķĪóāS─╣1cmż╬┼┼āSż╬╝■āS┐¶żŽ30GHzżŪżóżļĪŻż─ż▐żĻ╝■āS┐¶ż¼30GHz░╩æųż╦ż╩żļż╚āS─╣żŽ1cmż“└┌żĻmmź¬Ī╝ź└Ī╝ż╚ż╩żļĪŻ╝■āS┐¶300GHzż¼āS─╣1mmż╦┴Ļ┼÷ż╣żļĪŻśOŲ░┘Z├ōźņĪ╝ź└Ī╝ż╬77GHzż╬╝■āS┐¶ż└ż╚4mmØiĖÕż╬āS─╣ż╚ż╩żĻĪóØÖŠ’ż╦Š«Ę┐ż╦żŪżŁżļĪŻż╚ż│żĒż¼Īóź▀źĻāSż╦ż╩żļż╚┼┼āSżŽ╩³╝o(j©¼)ėXż╦╚»ż╗ż║ĪóźņĪ╝źČĪ╝Ė„ż╬żĶż”ż╦─Š└■┼¬ż╦ż╩ż├żŲż»żļĪŻ
żĮżņż“ŠW(w©Żng)├ōżĘżŲź»źļź▐ż╬ØiöĄ(sh©┤)ż½żķźņĪ╝ź└Ī╝ż“╚»╝o(j©¼)ż╣żņżąČŌō’ż╩ż╔ż╦╚┐╝o(j©¼)żĘżŲżĮż╬ż▐ż▐╠ßż├żŲż»żļż┐żßĪóØiöĄ(sh©┤)ż╦╚┐╝o(j©¼)ż╣żļČŌō’رöüĪóż╣ż╩ż’ż┴ź»źļź▐ż¼żóżņżąż╣ż░ż╦ĖĪĮążŪżŁżļĪŻż│ż╬└Łä®ż“ŠW(w©Żng)├ōżĘż┐ż╬ż¼ź»źļź▐ż“ĖĪĮąż╣żļź╗ź¾źĄż└ĪŻż▐ż┐24GHzż╬źņĪ╝ź└Ī╝żŌź»źļź▐ż╦żŽ╗╚ż’żņżŲżżżļĪŻ24GHzż╬āS─╣żŽ┘ć│╬ż╦żŽ1cmż“«Ćż©żŲżżżļż¼Īó12.5mmż╚żżż”╔ĮĖĮżŌżŪżŁżļż┐żßź▀źĻāSż╚Ō}żążņżŲżżżļĪŻ24GHzż╬ź▀źĻāSżŽ77GHzżĶżĻżŌ─Š└■└Łż¼╝Õżżż┐żßĪó╚»┐«ĄĪż╬╝■░Žż╬ČŌō’رż╣ż╩ż’ż┴ź»źļź▐żŌĖĪĮążŪżŁżļĪŻż│ż╬żĶż”ż╩└Łä®ż“ŠW(w©Żng)├ōżĘżŲĪ󟻟ļź▐ż╬ØiĖÕ╝■░Žż╬ĖĪĮąż╦24GHzźņĪ╝ź└Ī╝ż“╗╚żżĪóØiöĄ(sh©┤)ż“┴÷żļ┘Zż“ĖĪĮąż╣żļż╬ż╦żŽ77GHzż“╗╚ż├żŲżżżļĪŻ
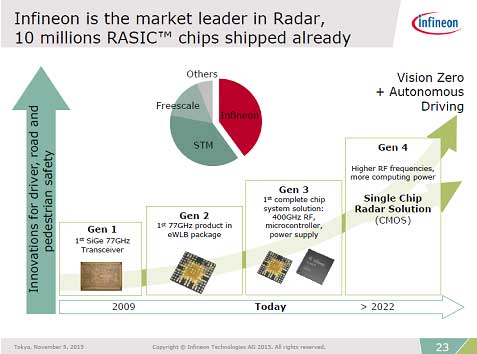
InfineonżŽĪóźņĪ╝ź└Ī╝źĘź╣źŲźÓż╬─Ńź│ź╣ź╚▓Įż“2009ŃQż½żķ┐▐ż├żŲżŁż┐ĪŻŗī1└ż┬Õē俎ĪóSi-GeźūźĒź╗ź╣ż╬Ų│Ų■ż╦żĶżĻźņĪ╝ź└Ī╝źĘź╣źŲźÓż╬ź│ź╣ź╚ż“30%║’žō(f©┤)żĘż┐ĪŻź╚źķź¾źĘĪ╝źąż“║ŅżļŠņ╣ńĪó“£═Ķż╬GaAsż└ż╚RFź┴ź├źūż¼8Ė─ØŁ═ūż└ż├ż┐ż¼ĪóSi-Geż╦żĶżĻ1ź┴ź├źūż╬ź╚źķź¾źĘĪ╝źąż╚╚»┐Č▀_(d©ó)1ź┴ź├źūżŪ║čż¾ż└ĪŻGaAsżŽ100mmż╬ź”ź¦Ī╝źŽżĘż½╗╚ż©ż╩ż½ż├ż┐ż¼SiżŽ200mmź”ź¦Ī╝źŽż¼╗╚ż©ż┐ĪŻż│ż╬ż┐żß╬╠ŠÅ▓Įż¼═Ų░ūżŪź│ź╣ź╚ż“║’žō(f©┤)żŪżŁż┐ĪŻż│ż╬ź┴ź├źūżŽAudiż╬A4ż╦┼ļ║▄żĄżņż┐ĪŻ
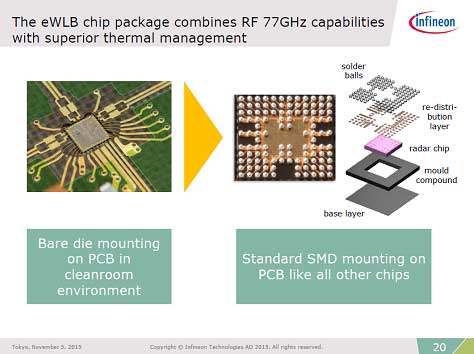
┐▐2ĪĪ77GHzźņĪ╝ź└Ī╝źĘź╣źŲźÓż╬─Ńź│ź╣ź╚▓Įż“╝┬ĖĮżĘż┐eWLBČ\ĮčĪĪĮąųZĪ¦Infineon Technologies
żĄżķż╦2012ŃQż╦żŽŗī2└ż┬Õēäż╚żĘżŲĪóeWLBĪ╩Embedded Wafer-Level BGAĪ╦ż╚Ō}żųźčź├ź▒Ī╝źĖź¾ź░Č\Įčż“│½╚»(┐▐2)Īóż│żņż╦żĶżĻŪ█└■─╣ż¼ø]ż»ż╩żļż╚Č”ż╦╩³ÕXżŌĖ■æųżĘĪóżĘż½żŌ╣Ō▓┴ż╩ź╗źķź▀ź├ź»ż½żķŖW▓┴ż╩źŌĪ╝źļź╔ż¼╗╚ż©żļżĶż”ż╦ż╩ż├ż┐ĪŻż│ż╬ż│żĒż╦żŽź╚źķź¾źĖź╣ź┐śO┐╚ż╬└Łē”żŌæųż¼żĻĪó77GHzŲ░║Ņż¼▓─ē”ż╦ż╩ż├ż┐ĪŻż│ż╬Č\Įčż╬Ų│Ų■żŪźņĪ╝ź└Ī╝ż╬źĘź╣źŲźÓź│ź╣ź╚żŽżĄżķż╦30%▓╝ż¼ż├ż┐ĪŻż│ż╬Č\Įčż╦żĶżĻVolkswagenż╬Golf 7żõDaimlerż╬Š«Ę┐┘ZSMARTż╦żŌ┼ļ║▄żĄżņżļżĶż”ż╦ż╩ż├ż┐ĪŻ▓żä”żŪżŽ║ŻżõżĄż▐żČż▐ż╩ź»źļź▐ż╦źņĪ╝ź└Ī╝ż¼║▄żļżĶż”ż╦ż╩ż├żŲżżżļĪóż╚Ų▒╝ęVPżŪAutomotive DivisionżŪSensor & Controlŗ╠ńGeneral Managerż╬Ralf BornefeldĢ■żŽĖ└ż”ĪŻĪųŗī1└ż┬Õż½żķĖĮ║▀ż▐żŪĪó5ŃQ┤ųżŪ╩Å└č1000╦³Ė─ż╬źņĪ╝ź└Ī╝ź┴ź├źūż“Įą▓┘żĘżŲżŁż┐ż¼Īó╝Īż╬1ŃQżŪ1000╦³Ė─ż“Įą▓┘ż╣żļ└¬żżĪūż└ż╚Ė└ż”ĪŻ
InfineonżŽĪ󿥿ķż╦ĖĮ║▀ż╬Si-Geź╚źķź¾źĖź╣ź┐ż╬╝ūéā╝■āS┐¶fTż╬2Ū▄ż╦┴Ļ┼÷ż╣żļ400GHzż“Ęeż─┐ĘĘ┐ź╚źķź¾źĖź╣ź┐ż╬│½╚»ż“Į¬ż©Īóŗī3└ż┬Õż╚żŌĖ└ż”ż┘żŁ┤░µ£1ź┴ź├źūż╬RFĪ▄ź┘Ī╝ź╣źąź¾ź╔övŽ®ż“│½╚»├µż└(┐▐3)ĪŻA-Dź│ź¾źąĪ╝ź┐żõĘQ¹|źżź¾ź┐źšź¦Ī╝ź╣żŌĮĖ└čżĘĪóĮą╬üż¼źŪźĖź┐źļż╚żżż”LSIżŪżóżĻĪóżĮż╬ż▐ż▐ź▐źżź»źĒź│ź¾ź╚źĒĪ╝źķMCUż╦└▄¶öżŪżŁżļĪŻż│ż╬źĘź╣źŲźÓżŪżŽźŪźĖź┐źļĮą╬üż╬77GHz╣Ō╝■āSLSIż╚MCUĪóźčź’Ī╝ź▐ź═źĖźßź¾ź╚ż╬3ź┴ź├źūż╬źņĪ╝ź└Ī╝źĘź╣źŲźÓż╚ż╩żĻĪ󿥿ķż╦─Ńź│ź╣ź╚▓Įż╣żļż│ż╚ż╦ż╩żļĪŻż│ż╬ź┴ź├źūżŽ2019ŃQż╦╬╠ŠÅ▓ĮżĄżņżļż╚żĘżŲżżżļĪŻ
┐▐3ĪĪInfineonż¼ķWż»źņĪ╝ź└Ī╝ź┴ź├źūż╬źĒĪ╝ź╔ź▐ź├źūĪĪĮąųZĪ¦Infineon Technologies
InfineonżŽźņĪ╝ź└Ī╝ż╬┬Šż╦Īóź╔źķźżźąĪ╝ż╬┤ķż“żĮż╬▒³╣įżŁżŌ┤▐żßżŲŪ¦╝▒ż╣żļToFĪ╩Time of FlightĪ╦öĄ(sh©┤)╝░ż╬3╝ĪĖĄź╗ź¾źĄż“│½╚»żĘżŲżżżļĪŻż▐ż└ź»źļź▐ż╦żŽ┼ļ║▄żĄżņżŲżżż╩żżż¼ĪóTier 1źĄźūźķźżźõż╦Ū╝żßżŲż¬żĻĪóŖZżżĮø(j©®ng)═Ķź»źļź▐ż╦┼ļ║▄żĄżņżļĄĪē”żŪżóżļĪŻToFżŽźņĪ╝źČĪ╝żõLEDż“╚»╝o(j©¼)żĘ╠ßżĻĖ„ż╚ż╬źčźļź╣ż╬░╠┴Ļ║╣ż“ĖĪĮążĘżŲš{(di©żo)▀`ż“▒RżļČ\ĮčżŪżóżļĪŻ10╦³▓Ķ┴Ūż╬źżźßĪ╝źĖź╗ź¾źĄż╦żĶż├żŲ3╝ĪĖĄż╬▒³╣įżŁż“┤▐żßż┐┤ķż“Ū¦╝▒ż╣żļż┐żßĪóź╔źķźżźąĪ╝ż╬×®Ąż╦╔┘VĪóHUD(źžź├ź╔źóź├źūźŪźŻź╣źūźņźż)ż╬░╠Åøż╬▌ö┘ćż╩ż╔ż╦╗╚ż”ĪŻż│ż╬ĄĪē”żŽśOŲ░▒┐┼Šżžż╬ź╣źŲź├źūż╬źņź┘źļŻ▒ż½żķ5ż▐żŪż╬ŲŌż╬źņź┘źļ3ż╦┴Ļ┼÷ż╣żļż╚żżż”ĪŻĖĮ║▀żŽźņź┘źļ2ż╬├╩│¼żŪżóżļĪŻ