ź¬Ī╝ź╚źŌĪ╝źŲźŻźųź’Ī╝źļź╔2020Ī╩3Ī╦Ī┴źņĪ╝ź└Ī╝ż╚MIMOżŪĪųĖ½żļĪūĄĪē”
79GHzźņĪ╝ź└Ī╝ż¼4GHz┬ė░Ķż╚ż╩żĻĪó60GHzźņĪ╝ź└Ī╝ż¼7GHz┬ė░Ķż╚╣Łż¼żļż╚Č”ż╦ĪóMIMOźóź¾źŲź╩ż“╗╚ż├żŲȧ┤ų╩¼▓“ē”ż“æųż▓żĶż”ż╚żżż”Č\ĮčĪ╩┐▐1Ī╦ż¼ŗī12övź¬Ī╝ź╚źŌĪ╝źŲźŻźųź’Ī╝źļź╔żŪīÖ╚»ż╦ż╩ż├żŲżżżļĪŻźņĪ╝ź└Ī╝āSż╬╚┐╝o(j©¼)ż╦żĶżĻĪóرöüż▐żŪż╬š{(di©żo)▀`Īó┐Õ╩┐Ī”Äņ─Šż╬öĄ(sh©┤)░╠Ī󿥿ķż╦żŽź╔ź├źūźķĪ╝Č\ĮčżŪرöüż╬Å]┼┘ż▐żŪ╝Ŗ▒RżŪżŁżļżĶż”ż╦ż╩żļĪŻ
┐▐1ĪĪźņĪ╝ź└Ī╝ż╚MIMOźóź¾źŲź╩żŪ×┤ō■(j©┤)رż¼Ų░żżżŲżżżļż╬ż½└▄ŖZżĘżŲżżżļż╬ż½ż¼ż’ż½żļĪĪĮąųZĪ¦Analog Devices
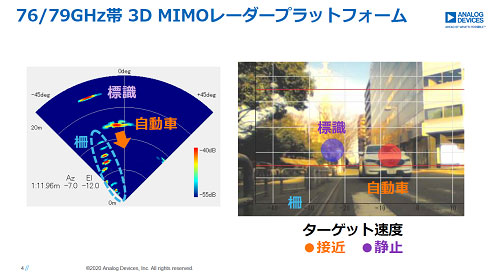
ź»źļź▐ż╬źņĪ╝ź└Ī╝żŽĪóż│żņż▐żŪرöüż╬Ń~╠Ąż“┤Čē¶Ī╩ĖĪē¶Ī╦ż╣żļż│ż╚ż└ż▒ż└ż├ż┐ż¼Ī󟻟ļź▐├ō²ŗżŪżŽČ§┤ų╩¼▓“ē”ż“æųż▓żŲĪųĖ½żļĪūż│ż╚ż¼żŪżŁżļżĶż”ż╦╚»·tżĘżŲżŁż┐ĪŻźņĪ╝ź└Ī╝żŽĪó×┤ō■(j©┤)رż╚ż╬š{(di©żo)▀`żõÅ]┼┘(ź╔ź├źūźķĪ╝Ė·▓╠)ż“ŠW(w©Żng)├ōżĘżŲĪó└▄ŖZżĘżŲż»żļżŌż╬ż½ż╔ż”ż½ż“Ė½╩¼ż▒żķżņżļĪŻ┼┼āSż╬Å]┼┘żŽĖ„Å]▐k─ĻżŪżóżļż│ż╚ż½żķĪóśO╩¼ż╬ź»źļź▐ż╬Å]┼┘żŽż’ż½ż├żŲżżżļż╬żŪĪó×┤ō■(j©┤)رż╚ż╬š{(di©żo)▀`ż“Ų¾ż─ż╬╗■╣’żŪ▒R─Ļż╣żņżą×┤ō■(j©┤)رż╬Å]┼┘ż¼ĄßżßżķżņżļĪŻż│żņż“┐¶Ī┴┐¶Ø▓╔├ż┤ż╚ż╦▒RżĻ╝ŖōQż╣żņżą╣’Ī╣ż╚╩č▓Įż╣żļ══╗ęż“Ąßżßżļż│ż╚ż¼żŪżŁżļĪŻ╝ŖōQÅ]┼┘żŽź▀źĻāS╚ŠŲ│öüż╬ē”╬üż╦äėż»░═┘Tż╣żļĪŻ×┤ō■(j©┤)رż╬╩č▓Įż“┬¬ż©żķżņżļż╚Īóż│ż╬└ĶżŽŪ¦╝▒ż╣żļż│ż╚ż¼żŪżŁżļżĶż”ż╦ż╩żļ▓─ē”└ŁżŌĮążŲż»żļĪ╩┐▐2Ī╦ĪŻ
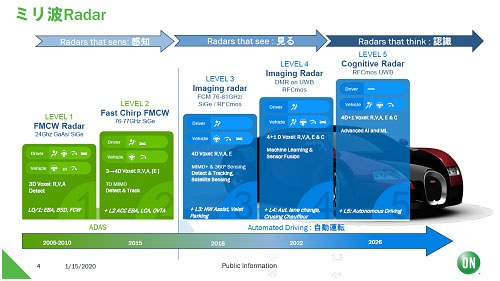
┐▐2ĪĪ79GHzź▀źĻāSźņĪ╝ź└Ī╝Č\Įčż╬źĒĪ╝ź╔ź▐ź├źūĪĪ║ŻĖÕĪųĖĪē¶Īūż½żķĪųĖ½żļĪūĪóżĮżĘżŲĪųŪ¦╝▒Īūżžż╚╚»·tż╣żļ▓─ē”└Łż¼żóżļĪĪĮąųZĪ¦ON Semiconductor
┐▐2żŽON Semiconductorż¼79GHzź▀źĻāSż╦×┤ż╣żļźĒĪ╝ź╔ź▐ź├źūż“┐āżĘż┐żŌż╬żŪĪó79GHzźņĪ╝ź└Ī╝ż╬╝■āS┐¶┬ė░Ķż“╣Łż»ż╣żļż│ż╚żŪĪóȧ┤ų╩¼▓“ē”ż“æųż▓źżźßĪ╝źĖź¾ź░ż╚żĘżŲ╗╚ż©żļżĶż”ż╦ż╩żļĪŻ
źņĪ╝ź└Ī╝ż╚żżż”┼┼āSż“╗╚ż©żąĪóLiDARżõź½źßźķż╬żĶż”ż╩Ė„ż“╗╚ż”żŌż╬ż╚żŽ░ŃżżĪóź½Ī╝źŲź¾żõ└LĪó╩╔ż¼żóż├żŲżŌŲ═żŁģsż▒żļż│ż╚ż¼żŪżŁżļĪŻź»źļź▐żŪżŽ£å─cż¼żŁż½ż╩żżĄKÜWŃtżõź½Ī╝źŲź¾▒█żĘż╦żŪżŌ┼┼āSż“ŠW(w©Żng)├ōż╣żļż│ż╚żŪĪųĖ½ż©żļĪūżĶż”ż╦ż╩żļĪŻź╔ź├źūźķĪ╝Ė·▓╠ż“ŠW(w©Żng)├ōż╣żļż┐żßĪóŲ░żżżŲżżżļرöüż╬Å]┼┘żŌ┘ć│╬ż╦▒Rżļż│ż╚ż¼żŪżŁżļĪŻź╔ź├źūźķĪ╝źņĪ╝ź└Ī╝ż╬╬“╗╦żŽĖ┼ż»Īó╝┬└ėżŌżóżļĪŻ
źņĪ╝ź└Ī╝╝■āS┐¶ż╬╣Ł┬ė░Ķ▓Įż╚MIMOźóź¾źŲź╩Č\Įčż“╗╚ż”ż│ż╚żŪĪóĖĪĮąż╣żļرöüż╬ȧ┤ų╩¼▓“ē”ż“æųż▓żļż│ż╚ż¼żŪżŁżļĪŻ┐▐3żŽAnalog Devicesż¼╝■āS┐¶79GHz┬ėżŪ┬ė░Ķ4GHzżŪż╬╝┬┘xż“┐āżĘż┐żŌż╬ż└ż¼Īó8ź┴źŃź¾ź═źļż╬MIMOźóź¾źŲź╩ż“32ź┴źŃź¾ź═źļż╬MIMOźóź¾źŲź╩ż╦żĘĪ󿥿ķż╦1GHzż╬┬ė░Ķż“4GHzż╦╣Łż▓żļż│ż╚żŪĪóȧ┤ų╩¼▓“ē”ż¼æųż¼żĻĪóرöüż╬Ę┴ėXż¼żŽż├żŁżĻż╚Ė½ż©żļżĶż”ż╦ż╩żļ══╗ęż“┐āżĘż┐żŌż╬żŪżóżļĪŻ
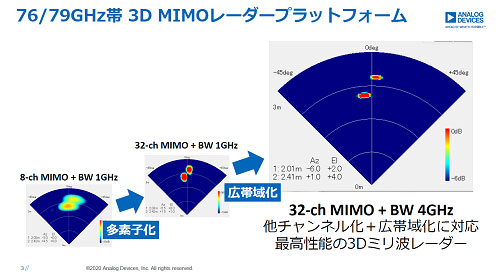
┐▐3ĪĪ79GHzż╬ź▀źĻāS┼┼āSż“┬ė░Ķ1GHzżŪ8ź┴źŃź¾ź═źļż╬źóź¾źŲź╩żŪ╚¶żążĘż┐▓ĶćĄ(║Ė)ż½żķĪóMIMOźóź¾źŲź╩ż“╗\żõż╣ż╚Ų¾ż─ż╬رöüż¼╩¼▀`żĄżņ(├µ)Ī󿥿ķż╦┬ė░Ķż“4GHzż╦╣Łż▓żļż╚š{(di©żo)▀`żõöĄ(sh©┤)Ė■żŌż’ż½żļĪĪĮąųZĪ¦Analog Devices
Analog DevicesżŽĪó╣±ŲŌż╬źņĪ╝ź└Ī╝ź╗ź¾źĄ└▀╝Ŗ▓±╝ęż╬źĄź»źķźŲź├ź»╝ęż╚┴╚ż▀Īó79GHz┬ėż╬źņĪ╝ź└Ī╝źĘź╣źŲźÓż“×æ║ŅĪó2±śż╬ź╚źķź¾źĘĪ╝źąż╚48ź┴źŃź¾ź═źļż╬MIMOźóź¾źŲź╩ż“ŠW(w©Żng)├ōżĘż┐źņĪ╝ź└Ī╝źūźķź├ź╚źšź®Ī╝źÓż“×æ║ŅżĘż┐ĪŻš{(di©żo)▀`╩¼▓“ē”ż¼4cmĪó┐Õ╩┐│č┼┘╩¼▀`└Łē”3┼┘ż╚żżż”╩¼▓“ē”ż“įużŲżżżļĪŻźĄź»źķźŲź├ź»żŽĪóWindowsź┘Ī╝ź╣ż╬öU(ku©░)ĖµźĮźšź╚ź”ź©źóżŌ─¾ČĪżĘżŲżżżļĪŻź½źßźķ▓Ķ楿╦źņĪ╝ź└Ī╝▓Ķ楿“─_ż═ż┐żĻĪóźŪĪ╝ź┐ż“╩▌┘TĪ”║ŲÖ┌żĘż┐żĻż╣żļĄĪē”ż╩ż╔ż¼źĮźšź╚ź”ź©źóż╦┼ļ║▄żĄżņżŲżżżļĪŻ
ż╣żŪż╦Å]╩¾Ī╩╗▓╣═½@╬┴1Ī╦żŪ┼┴ż©ż┐ż¼ĪóInfineonżŽ60GHzź▀źĻāSźņĪ╝ź└Ī╝żŪ┬ė░Ķ7GHzż╚╣Łż▓ż┐ż│ż╚żŪĪó┘ZŲŌż╦żżżļ┐═ż“Ė½╩¼ż▒żķżņżļżĶż”ż╦ż╩ż├ż┐ĪŻ60GHz┬ėż╬źņĪ╝ź└Ī╝żŽĪó┴Ēē»Š╩ż¼░c┤ųŠW(w©Żng)├ōżŪżŁżļżĶż”ż╦╝Ŗ▓ĶżĘżŲżżżļĪŻźņĪ╝ź└Ī╝ż╬źżźßĪ╝źĖź¾ź░ŠW(w©Żng)├ōżŽ║Ż╗Žż▐ż├ż┐żąż½żĻż└ĪŻ
╗▓╣═½@╬┴
1. ź¬Ī╝ź╚źŌĪ╝źŲźŻźųź’Ī╝źļź╔2020Ī╩1Ī╦Ī┴▓─Ų░ŗ╔į═ūLiDARżõ60GHzźņĪ╝ź└Ī╝ż╩ż╔ (2020/01/17)
2. ź¬Ī╝ź╚źŌĪ╝źŲźŻźųź’Ī╝źļź╔2020Ī╩2Ī╦Ī┴MSż╩ż╔żŽż╩ż╝ź»źļź▐ż╦╗▓Ų■ż╣żļż╬ż½ (2020/01/22)